
Blog October 2021 - June 2022
Here you can find all of our older Blog-updates.
13.5 Results of the competition
Yesterday were the presentations on the analysis of the collected data. We were one of the few teams that had an almost complete data set and were able to deliver solidly. One and a half hours later the jury announced the result: 2nd place!!! We are runner-up of the German CanSat competition 2021/22. We are very proud of this result. The last 8 months were a nice but also challenging time. We would like to thank all our sponsors for their support during the competition, but also everyone who kept us motivated during the competition, so that we never gave up, no matter what problems we had to overcome. Maybe we will see each other again for the next competition!
02.05. Update
At the moment we are sitting intensively to evaluate all our collected data as good as possible. Unfortunately, the GPS data are not included. On 12.05 there will be the presentation regarding the evaluation and on the same day the results of the competition will be announced. Of course we hope for the best!
05.04. CanSat Launch
Today at 17h was the livestream of the CanSat launch. We are happy to have brought this project this far. However, we are disappointed that the launch did not show how our CanSat was loaded into the rocket and dropped down. I guess we will have to rely entirely on the data we have collected and probably do not have a video showing our CanSat falling. Nevertheless, we are happy that all CanSats could be recovered. In addition, we are now anxiously awaiting the arrival of the CanSat with its data-let's see what we can get out of it!
30.03. Conference with every Team and Presentation
Today we had the final presentation of all teams. There were a lot of very nice ideas and approaches, which we would definitely implement if we were to participate again. At the same time we are very sorry for the teams that cannot send their CanSat. We know how much work is involved in such a project and therefore this is all the more regrettable. We are now looking forward to next week's launch campaign and wish everyone the best of luck.
After the conference we took some shots of the video.
28.03. Finishing Up
After we completely rebuilt the CanSat on Saturday and on Sunday, today we did the functional tests and the finishing touches. We did all the functional tests and finished the CanSat today after we rebuilt the entire CanSat on Saturday. In addition, it was shipped on time. At the same time, we finished and sent off the user manual. So now we are looking forward to the conference and the launch campaign.
26.03. We got a problem
Once again we have a problem. Today we wanted to do the last function tests in the school and then send the CanSat. However, this did not happen today. When we wanted to start our program, nothing worked: I2C could not be defined, SPI also not. We could eliminate these errors after 30 min troubleshooting. But then still none of the components worked. We suspect that somewhere the Pi had a short circuit.
So we checked all connections and all sensors. None of it helped. Instead, the circuit board of the Pi layer kept breaking down - too much desoldering will eventually break the solder joints.
So we decided to rebuild the whole CanSat again. In wise foresight we had ordered all sensors again in duplicate after our first fail (see blog entry from 23.02.). Therefore we could build the whole CanSat again after validations.
In addition, we noticed an error in the wiring of the second BMP: Both BMPs were on the same I2C rail and thus defined exactly the same. Because of this it was not possible to read out both BMPs. Fortunately, we still had free pins for the second BMP and could thus connect it to the pico again via other pins.





23.03. Completion of the streamers
Today we thought again about the construction of our streamers. The last ones were not cut properly, so we couldn't find enough space in our CanSat. In addition, we had to think about how to roll the streamers-because we would never have been able to fit the 4 streamers needed for the main recovery system into the volume for the recovery system in 4 individual rolls. So we came up with a technique for rolling the streamers. So all 4 streamers are rolled up together and placed on the CanSat.
In addition, we finally got to work on the hull design and printed it. The hull is outside in the colors of the Ukraine. The design was strongly dependent on the streamers: Since we need a height of 6.5cm for the streamers, the hull had to make room for 2cm in addition to the estimated height of 4.5cm due to competition rules. We were able to do this because our CanSat itself is only 9cm high. This allowed us to add an intermediate floor at 9.2cm height of the hull, on which the strommer will rest.
In addition, we started today with the animations for the video and for the presentation.
21.03. Last tests for the streamers
Today we did final tests on the recovery system and designed a new recovery system: We will take a certain number of 6.5cm wide, 15m long streamers from now on. 4 of them form our normal recovery system for 11m/s, 2 form the bad-weather system for 15m/s. With this, the recovery system is finally ready
16.03. Continuing work on CanSat
Today we looked for some inspiration for the video and the final presentation and planned the course of the next two weeks-it will be stressful, especially because the exam period starts.
9.03. Short Update
We delivered the final report on Sunday. At the same time, our final spurt begins. Last tests and verifications are planned, and the video for the team presentation still has to be made. We're looking for inspiration right now - let's see what comes out of it.

3.03 Meeting with Mayor Mr. Hetjes
Today we had a meeting with the Lord Mayor of the city of Bad Homburg, Mr. Hetjs. To this we presented the CanSat competition and our work of the last five months in this competition. Not only did he promise us access to the roof of the city hall in case we need to do further drop tests, but we are now also allowed to welcome the city of Bad Homburg as a new sponsor of our team. Of course we are very happy about that. The roof of the town hall could also be useful for us in the future, but maybe we'll have something even better soon - you can stay curious about that.
28.02 Technical Briefing
Today we had a digital meeting with the organization of the competition to talk about the safety of the CanSat. So far this seemed to be satisfactory and as of now, we are allowed to start with our CanSat. This does not mean that it is safe yet, as we still have to pass a final technical inspection, but still good news.
Also, we have new ideas on how to solve the problems we have with our giant streamers. Tests for this are planned for Wednesday.
Not to forget: we may welcome the IKN - Ingenieurs Planungs GmbH as a new sponsor and thank them very much!
24.02. Not that bad
Then today we were busy all morning and forenoon saving leftovers.
A BNO still works. A BMP does as well. The GPS with the broken PCB-it still responds, but we are reluctant to use it in the CanSat. We have therefore ordered new ones. The Picos also only had problems with the flash. We were able to fix those with a flash-nuke. At least that's good news. Nevertheless, yesterday was a massive setback. But we are back on track. We now have stricter testing guidelines in place so that something like this won't happen again.
We're now waiting for the new GPS modules and hope to get it all done before Monday.
23.02. We got a Problem
We started normally-printed a new switch layer, inserted it. Everything is connected, everything works. We thought. When we wanted to finalize the program, we noticed something: Our GPS gives a strange error code: Value error: No Device at I2C-Adress 10. No matter what we did, the error didn't go away. We had this error once before - on Monday. We removed a little solder from the GPS and it worked. But that was nothing. It didn't help. Then we thought: good thing we have replacements of the critical sensors-all except the GPS. That wasn't supposed to arrive until tonight. Fortunately it did. So: tested GPS, put it on a new PCB with second BNO and second BMP, soldered it. That was a damn stupid decision: we had the same error again-now only with the BNO and not the GPS. So we thought about how to get the individual parts off again. Unsoldering didn't work - we had already tried that without success. So we had another idea: We cut the breakouts out of the PCBs and then re-solder the pin headers. We can do that and we went straight to work.
In the process, we destroy the new GPS-the PCB is completely exposed. We break one BMP. And in the process we destroy 40% of our top layer PCBs. 100 EUR of sensors are gone, we have no GPS breakout anymore, one BNO is broken, and one BMP doesn't work anymore. And this when we were supposed to have the thing ready on Monday! Bummer! We went home at 22h absolutely frustrated. In addition, we have shot 2 Raspberry Pi Picos and thus used up our supply.



22.02. Revisions of the mechanical structure
We only got a little bit of trouble from the janitor for yesterday (sorry), that it was a little bit too long yesterday. We didn't program today after all-instead, a few mechanical adjustments were made: We replaced the threaded rods with 5 mm diameter steel rods with a thread cut in the top and bottom. In addition, the PCBs of our BMPs had to be filed down a bit-so nothing major. We also reworked the accumulator layer and the switch layer. Tomorrow these will be printed, and then the CanSat will be mechanically ready!
About the CanSat: Without the case, it is 10.5 cm high and weighs 202g (excluding the flowers). That's a bit too light, so now we have to come up with funny things for the weights. Let's see what we will find. But of course we are also open for suggestions.
21.02. Our PCBs are there!!
We actually just wanted to continue writing the final report today. But then the good news arrives: Our PCBs have arrived!
So what are we doing? Of course, we work from 14-22:30h at school only on the PCBs and finish our final program so far that we can try everything tomorrow! (Well, we fixed a few bugs, but we will do the real tests tomorrow). Our PCBs are still on regular M5 threaded rods-that will change in all likelihood.
We also started the design of our battery layer today and finalized it for now. We hope that everything will work tomorrow.

19.02. More Drop Tests
We were back on the tower roof. Instead of the iPhone, we now used our Raspberry Pi Pico. We will only use the Raspberry Pi Pico from now on, for the following reasons: First, in the CanSat we will also have only one Raspberry Pi Pico available and the drop tests are therefore tests to see if the final CanSat will work. Second, during one of the drop tests, the flutter tape came off the protective cover and the case thus fell from the sky without any braking from a flutter tape. This was the last drop test for the phone, as it has never come back on since. Too bad.
But there is also good news: We have reached terminal velocity and that at exactly 11 m/s. With this we could prove simualtion values from OpenRocket and we have the first part of our recovery system. Our flow will be gigantic-4.5x0.45m-but we are happy about that for now. The only question now is how we can accommodate this amount of material weight-wise and folding-wise.
It's also good that we're done with the drop tests, because starting Monday the school will be a construction site-there's no more throwing stuff off the tower.
We have to thank the janitors who made it possible for us to do drop tests on a Saturday at the school.
09.02. First tests on the braking mechanism
We were officially the first students on the school tower roof. From there, we threw stuff down: A pencil case with an iPhone 6s in it, which we used to analyze acceleration data from the fall.
We need to reach a terminal velocity of 11 m/s for the CanSat. In free fall, we would be at about 36 m/s. That is a bit fast. Therefore, a so-called strömer-one cut band of metallized gift wrap came to the cell phone.
The slingshot was further developed-it now consists of HT tubes. However, we don't get a better height than by throwing.
As a by-product of the drop tests with the streamers, we also decorate the school's trees. Nice, isn't it?
You can find pictures on the right.






25.01. CanSat Update
A lot has happened in the last few weeks:
We have officially won Merck as a sponsor. The talks had been going on for some time, but now we are happy about the support.
In the last days we started to design the PCB's for the finished CanSat. We already have the main layer with the Raspberry Pi Pico, and our first sensor layer with acceleration, temperature, pressure sensor and GPS.
At the same time, preparations are underway for testing our braking mechanism: we have started to build a slingshot, with which we hope to be able to spin the CanSat high enough to estimate the fall speed.
There have also been some changes in the equipment we use: we have a new accelerometer and we have different radio modules.
25.12. Completing the programming of the existing sensors
According to our schedule, we wanted to be finished with the programming of the previously existing CanSat by Christmas. We were able to meet this goal thanks to Boris. So we are now done with the launch sequence and the primary mission of the CanSat. In addition, the GPS module and the gyro are working. So we can go into our Christmas vacations with peace of mind.
22.12. Completion of the interim report
Über die letzten Wochen hatten wir bereits einzeln angefangen, den Zwischenbericht für den CanSat zu schreiben. Pünktlich zum Ferienbeginn konnten wir also die zum Zwischenbericht notwendigen Materialien erstellen. Nach guten 11h Arbeit heute waren wir fertig. Damit können wir uns jetzt auf die Programmierung des CanSats konzentrieren.
14.12. Gewinner des DLR-Schoollab Windrad Wettbewerbs
Heute war ein wichtiger Tag für uns: Die Siegerehrung des DLR Schoollabs stand heute endlich an. Wir freuen uns, dass wir den DLR Schoollab-Preis 2021 gewonnen haben. Wir hatten ein vertikales Windrad mit einem Wasserstoffspeicher gebaut.
Wir sind äußerst begeistert über diesen Erfolg für das Team.
Die Ausarbeitung zu dem Wettbewerb ist in unserem Archiv.

13.12.
We have a problem: we can't program the Raspi Zero well. So today we decided to switch to the Raspi Pico. This offers us some advantages: More I2C ports and less space consumption. We just have to see if we can still accommodate the camera as we had planned.
10.12.
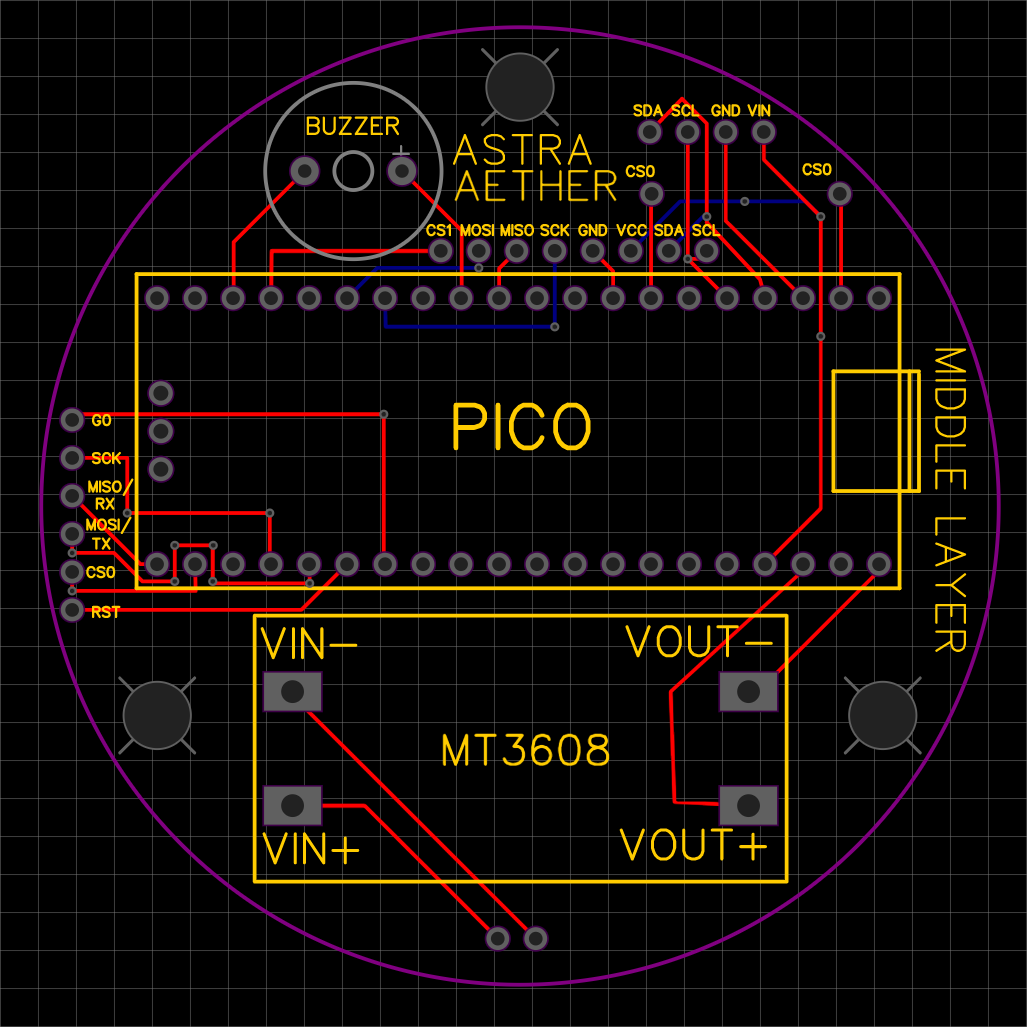
We have one more layer ready: The so-called power layer. It contains the DC-DC conversion we will need, as well as the data SD's and the micro-USB port for power and data. Next to it there is a render of the layer.


8.12.
We have finished the cabling for the first layers. Now we can finally start programming the sensors. For this purpose, the CanSat is now with Boris.
The current cabling is only a temporary solution until everything is programmed. Then we want to solder all cables.
6.12.
Over the last week we have made the first progress in programming the GPS module and we have completely reworked the sensor layer.
The GPS module presented us with some challenges, so it took us longer than planned.


1.12.
Over the week, some more progress was made: We thought about a mount for the Raspi Zero, and printed it. Today, the mount for the barometer and gimbal were developed. Over the week, we played around a lot with the school's 3D printer and made some improvements. Next is the design of the sensor layer, that is the layer of the air pressure and temperature sensor, the gimbal and the buzzer.
In addition, we received another very important news for us: The award ceremony from the DLR wind turbine competition is coming up. We are very excited about the results
24.11.
We now have the plan ready: We want to use a Raspi zero as motherboard. To determine the location, we want to use a differential GPS, so that the coordinates in the plane are very accurate. For height determination we want to use the air pressure.
At the same time the design for the first layer is finished: The GPS module is ready, with the corresponding layer. Next to it is a render of the layer.

22.11.
We had another meeting with the Orga team today. Our new idea is fine. So what do we have planned?
We want to build the satellite in a modular way. To do this, we want to construct individual layers, each housing a part of the CanSat. As sensors we want to use the provided air pressure and temperature sensor, as well as a gimbal. The CanSat will then be intercepted and picked up in the air by a drone when we have the time. Currently, we are still thinking about a tracking mechanism that can be used to implement this accurately. The current ideas are either ultrasound, laser or computer vision.
17.11.
The 3D model for the new idea is developed. We try to make everything as safe as possible
15.11.
We have a problem: We are not allowed to carry out our first idea of the Cansat in its current form due to legal requirements. Therefore we need a new idea. We already have one: We want to build a "normal" CanSat, which fulfills the primary mission. This should send the measured data only to a ground station.
But that would be too simple. Therefore we want to catch the CanSat with a drone from the air and bring it safely to the ground. Whether we are allowed to do this will be decided next Monday. Nevertheless, we are already busy with the 3D model and the necessary calculations.
Therefore we have also changed our logo: We can no longer use the old one...
07.11.
The Blender model is ready. The matching video and a few pictures of the design too.


03.11.
The setup of our test equipment begins. We need a non-motorized gimbal to program the directional control of the CanSat. It should only move in the desired direction. Normally, because of the symmetry of the setup, the CanSat would not tilt in a straight line, but in a rotational motion. However, this rotational movement is undesirable, which is why the canSat must be calibrated. We built the gimbal for calibration today.
It consists of 2 axes, so that it can tilt in all directions. It is also mounted on a rotatable plate, so we can compensate the torque of the rotor.
We also ordered the necessary parts for the CanSat.
The search for sponsors continues.
29.10.
The search for sponsors has begun. We start building this website and social media profiles. The team clothing from Alpha-Industries arrives.